
目标检测是把视频序列中出现的感兴趣目标从背景中分割出来并精确定位。目标检测除了具有一般的服饰变化、姿态变化等难点外,在车载应用领域还具有以下难点:摄像机是运动的;目标检测面临的是一个开放的环境,要考虑不同的路况、天气和光线变化,对算法的鲁棒性提出了很高的要求;实时性是系统必须满足的要求,这就要求采用的图像处理算法不能太复杂。在与行车安全相关的功能中,目标检测主要包含了对车内环境下驾驶员的人脸检测、户外环境中的车辆检测。
针对车载系统对目标检测的上述要求以及为了提高目标检测在不同姿态的效果,我们开发了基于统计学习的多姿态目标检测算法。在这里,检测器除了获得目标的位置和大小信息外,还需要获得大致的姿态信息用于人头的姿态估计。
下面该算法框架分别应用于车辆检测和人脸检测,并介绍他们与当前流行方法的比较结果:
车辆检测
车辆检测是前车防撞功能模块的基础环节。下列视频为我们的算法在不同天气情况下对车辆正反面的检测效果:
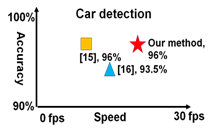
对于车辆检测,我们在对收集的1200张图片(包含总共1388辆车)进行了测试,其测试精度为: Recall: 95.2%, Precision: 96.1%。与文献[1]以及[2]在精度和速度方面的比较结果如下:
人脸检测
下图展示了人脸在不同姿态效果下的检测效果,同时给出了人脸不同朝向的估计值。我们能够看出朝向的预估结果并不十分精确,在偏离正脸不是很大的情况下,仍然会被判为正脸。

下表为我们的算法与opencv的人脸检测器(目前常用的检测器)比较的结果,测试集为lfpw数据库中用于测试的共计224张图片,278个人脸。
| Our method | Detector from opencv | |
|---|---|---|
| 正确检测的数量 | 261 | 249 |
| 错误检测的数量 | 0 | 16 | 检测速度 | 30ms/frame | >80ms/frame |
从上表中我们可以看出,我们的方法的检测率以及误报率都远好于目前常用的检测器。除此之外,我们的检测器还能给出大致的人头朝向信息。
从上面的人脸检测、行人检测以及车辆检测的结果可以看出,我们提出的目标检测框架具有通用性的优点,且在速度和性能上已经达到超过了国际先进水平。
下列视频展示了在真实车载环境下的车辆检测和跟踪结果,以及基于检测基础上进行的前车距离估计和碰撞时间估计。 视频中存在逆光、光线突变以及树影等环境因素的干扰,但我们的检测算法仍然能够有效去除这些干扰的影响。 :
[1] Wei Zheng, Hong Chang, Luhong Liang, Haoyu Ren, Shiguang Shan, and Xilin Chen, “Strip features for fast object detection”. IEEE Transactions on Systems, Man and Cybernetics, Part B: Cybernetics, vol.99, pp.1–15, 2013
[2] B.Wu and R. Nevatia, "Cluster boosted tree classifier for multi-view, multi-pose object detection", ICCV, 2007